Tools and Sampling
A tool belt you can count on
ROPOS and its operators have built their reputation on the successful development, implementation and use of complex scientific and engineering tools for a wide range of seafloor tasks. From the brute strength of rock-cutting submarine chainsaws or jetting pumps to the most complex and delicate scientific apparatus, ROPOS has “done it all” and is always ready for a challenge.
Sample Storage
Biobox, swing arms, and platforms
ROPOS can be fitted with a bio-box platform and two swing arms. The bio-box can be configured to have one large (33"x14"x12") and two smaller compartments (14"x14"x12" each), or alternatively with four smaller compartments (14"x14"x12" each). The bio-box has hydraulically controlled lids that keep your samples safely stowed and separate throughout the dive. Depending on your requirements, the bio-box can be replaced by a platform which can carry a variety of payloads. Additionally, each swing arms can be fitted with baskets, core tubes, or custom payloads. As their name implies, the swing arms are safely stowed away when not in use.

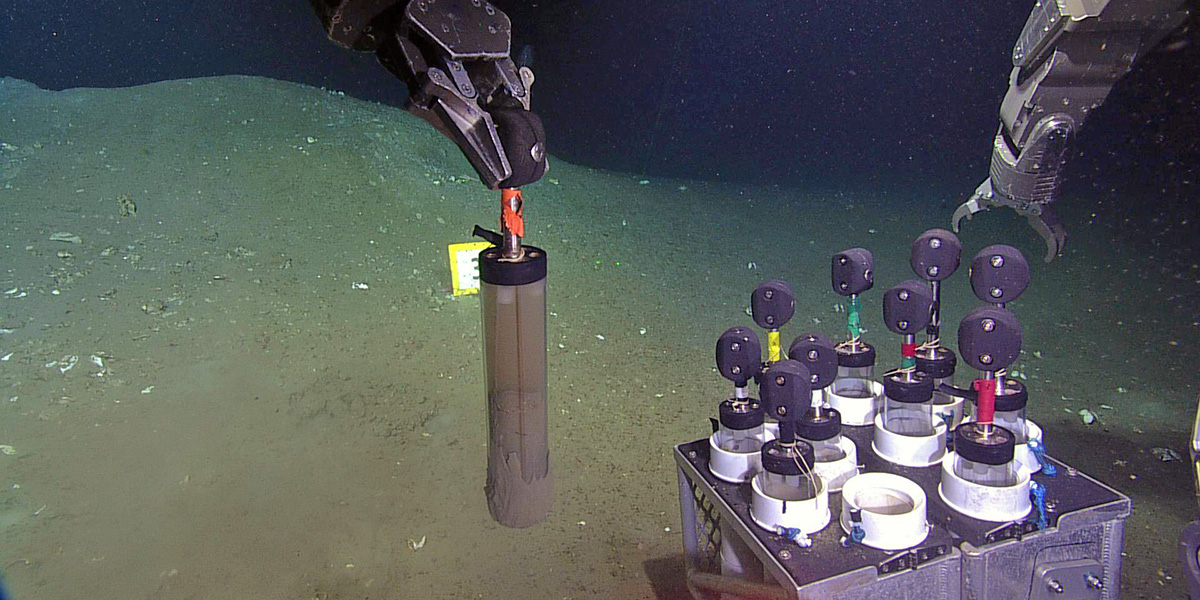
Core Tubes
Carry over 10 per dive
Core Tubes are used to take a sample of the bottom with the ROV. This sample can typically be kept quite undisturbed considering the journey it will take. In short, this is the process: A plastic tube with a 3” OD is pressed into the sediments on the bottom. This pushes material into the tube and at the same time, pushes water out the top of the tube. The material is trapped in the tube and the tube pulled out of the bottom. The tube is then placed in a holster and recovered to the surface.
Temperature
4Temp sensor
As the name implies, the 4 Temp is an array of four temperature probes. These are Pt100 probes with an accuracy of about 0.1 degree Celsius. Two of the probes are normally mounted into the Suction sampler. One on the inlet right at the nozzle and one immediately outside the jar. These can be used to determine if the sample being taken is getting into the jar and when it is the same temperature.
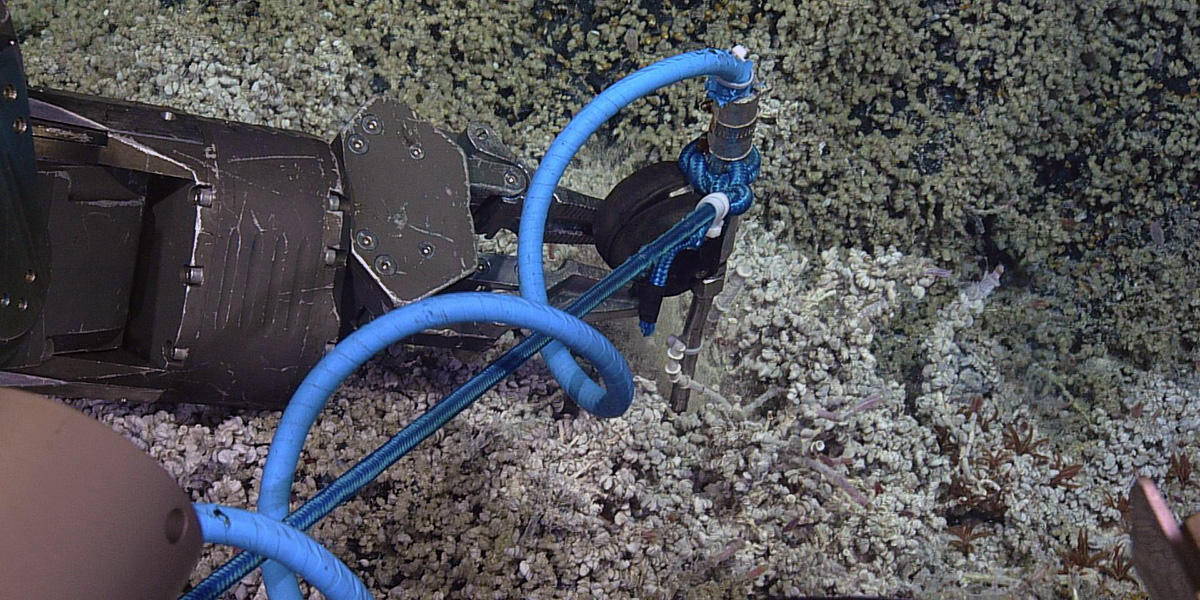
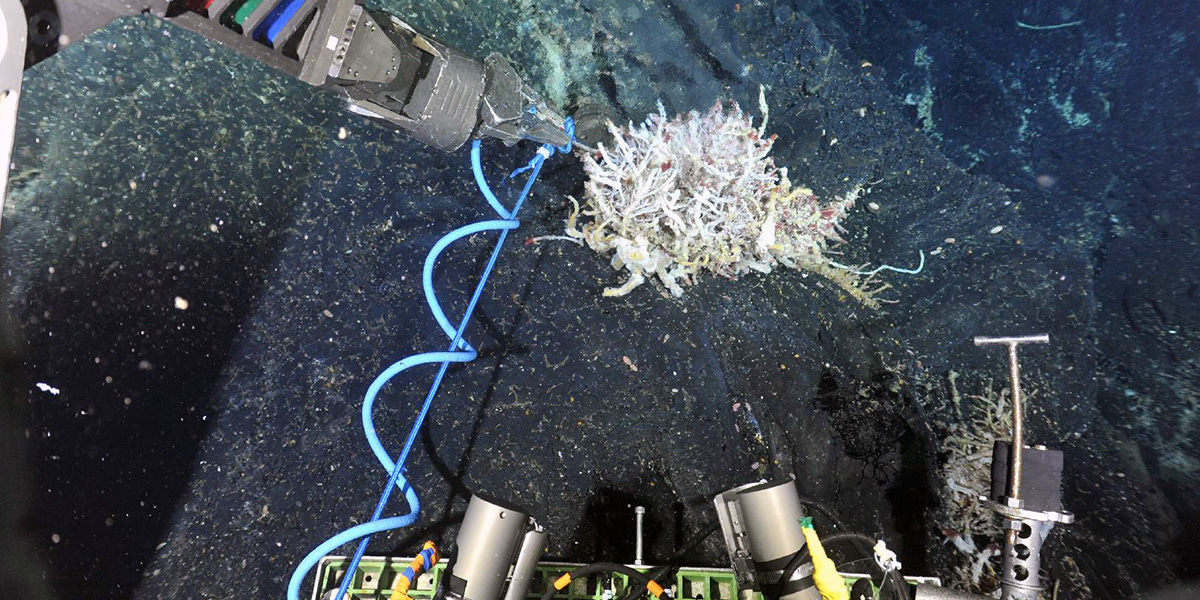
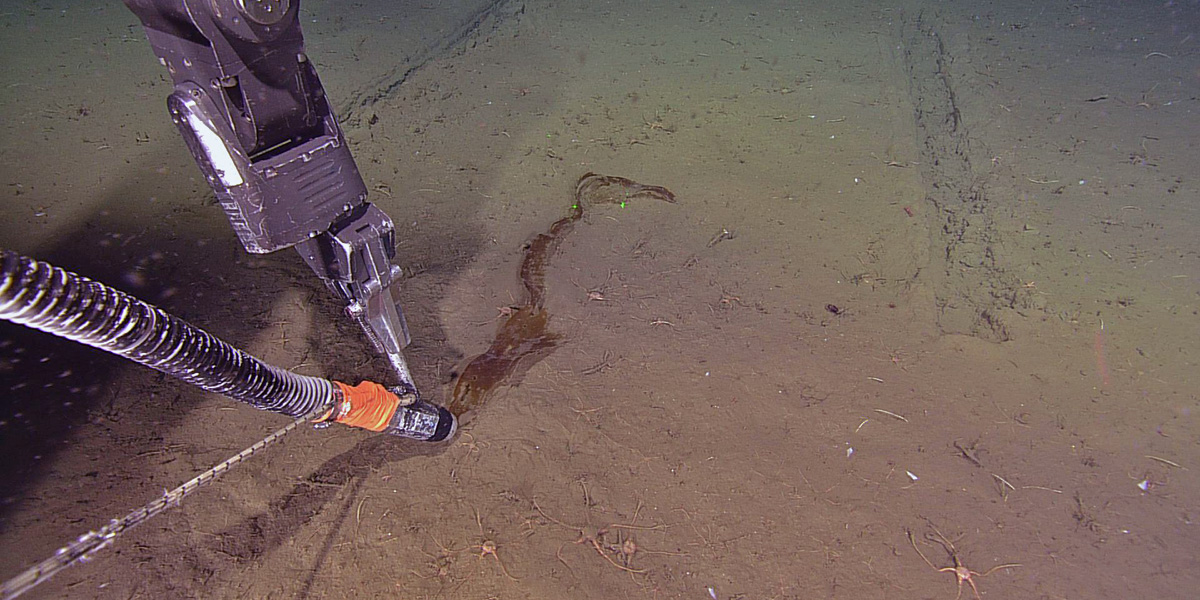
Suction Sampler
Vacuum up discrete samples
The suction sampler is basically an underwater vacuum cleaner with many jars instead of a single bag. There are eight, two liter plastic jars on a indexing carousel. Like a vacuum, each jar has a filter on the outlet so whatever gets sucked into the jar is trapped there. The nitex filter sizing on the outlet of the jar controls the size of the trapped material. A coarse filter mesh means fine particles will not be captured. Filters must be 1mm or smaller. Of the eight jars, only seven samples are typically taken and the eighth jar is used as a flush jar to clean out the hose.
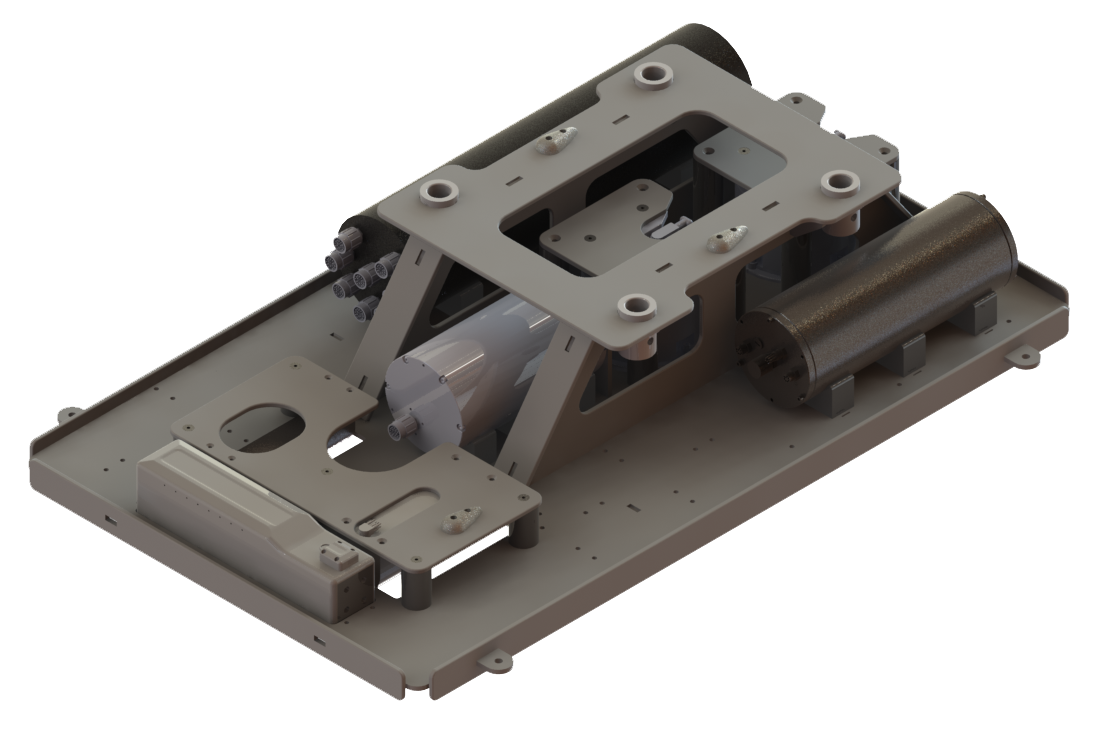
Multibeam
Reson Seabat 7125 Multibeam Skid
CSSF designed and built a multibeam skid which attaches directly to ROPOS’ through-frame lift system. The multibeam skid was designed with the chief objective to bring all required navigation sensors in a clear frame of reference in order to: (1) reduce any initial offset errors between sensors to a minimum, and (2) to keep the offsets consistent should the skid need to be removed to complete other operational goals. The skid uses the Reson Seabat 7125 ROV2 with both the 200 and 400 kHz projectors and all required navigation sensors.
Water Sampling
Niskins
Up to 4 Niskins can be mounted on ROPOS. Each Niskins collects a sealed water sample of 5 liters from the depth it was taken. The Niskins are triggered remotely via hydraulic actuators. They are triggered when the ROV is in position and cannot be reset.

And many more...
Hundreds of tools and sensors have been used and interfaced on ROPOS